The Bot
The bot was designed using Solidworks, and was primarily constructed from laser cut 1/8" masonite. The masonite skeleton is assembled using a combination of press fits, slip fits, cotter pins, and threaded fasteners.
The wheels and hubs, supplied by Bane Bots, attach to our 1/4" axles with a set screw. The axle is supported at two points using 1/4" nylon spacers, which were we attained for free. The spacers were press fit into the masonite skeleton. The axle is coupled to the driving maxon motors using spider couplers.
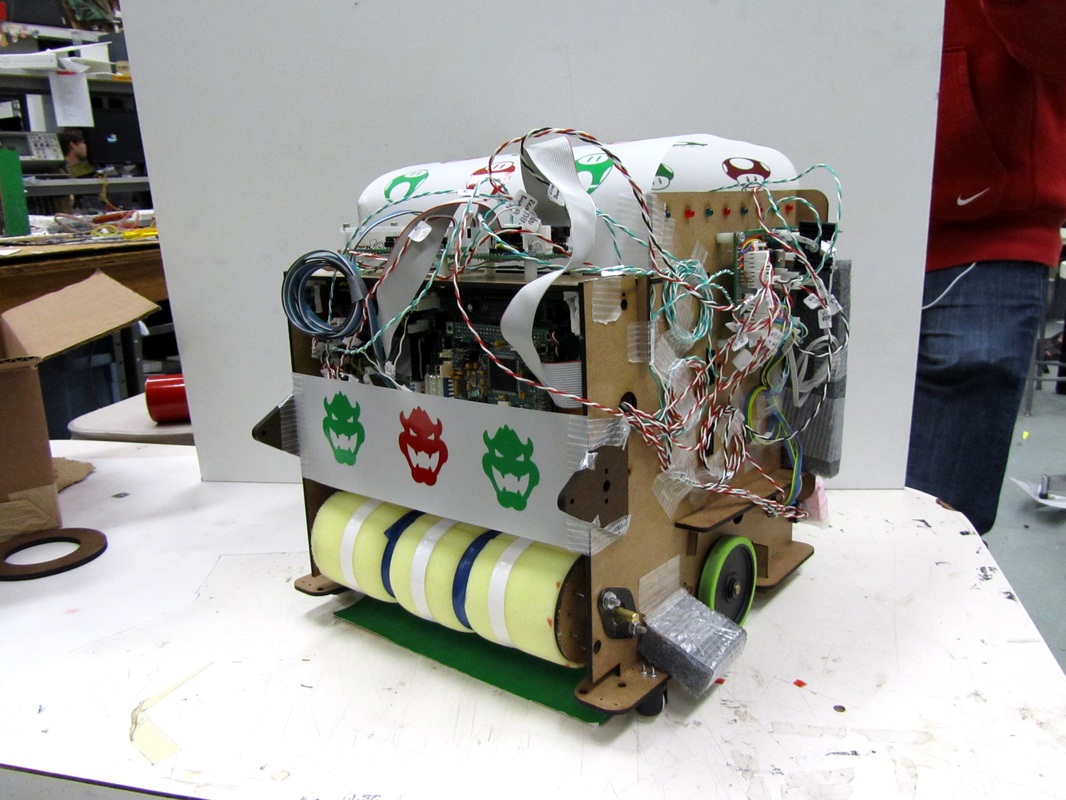
The ball gathering roller is coupled to its motor by a 1/4" belt and pulley system. The 1/4" brass axle of the roller is supported at two ends with needle roller bearings. The foam was radially split using a hot wire cutter so that the the axle could be installed through its axis. Two masonite wheels cap either end of the foam, and attach the foam to the masonite with 4" long strips of bailing wire that extend into the foam. The masonite wheels are fitted to the metal ends of a spider couple, which is clamped to the axle. This assembly has proven to be very effective at pick up ping-pong balls, features a wide intake area, and requires minimal power to drive. A sheet of poster paper serves as the smooth ramp to guide the balls from the ground to their launch trajectory. A sheet of mylar guide the balls from the launch trajectory, into the hopper.
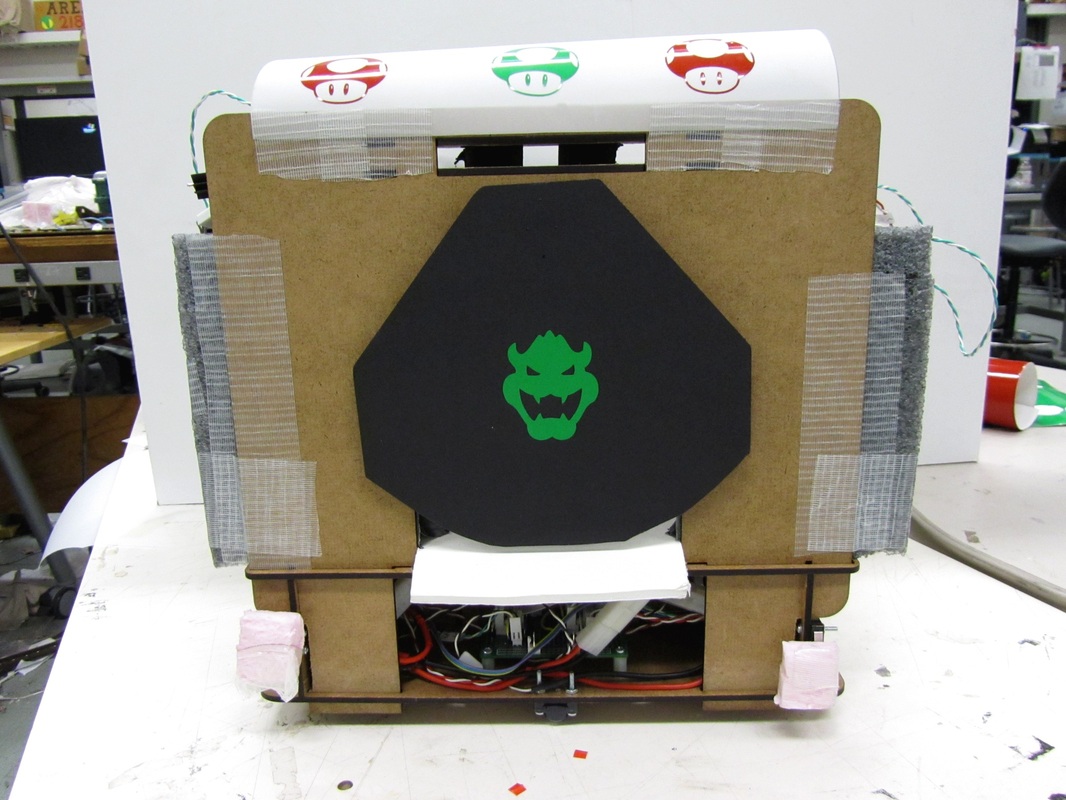
The ball hopper features a slight ramp so that balls may roll by gravity to the exit of the hopper. A servo swings a gate out of the way when desired so that the balls may roll into the bins.
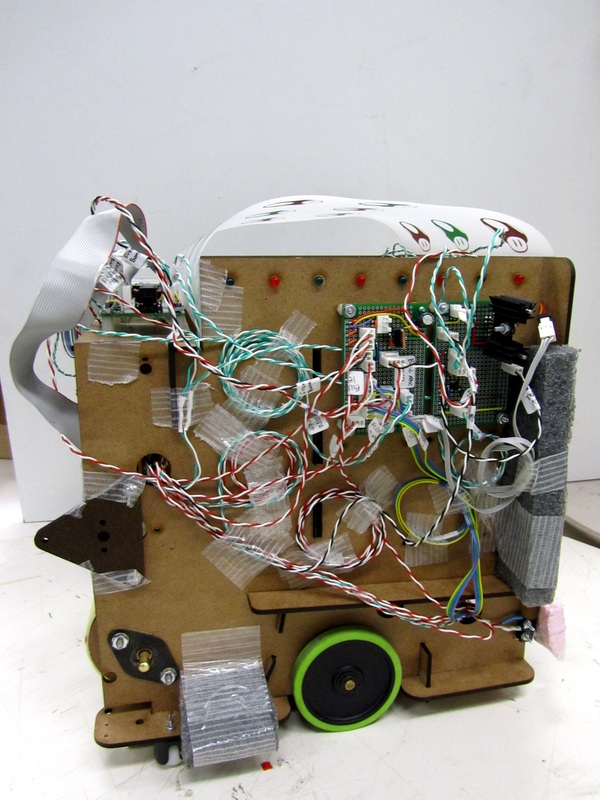
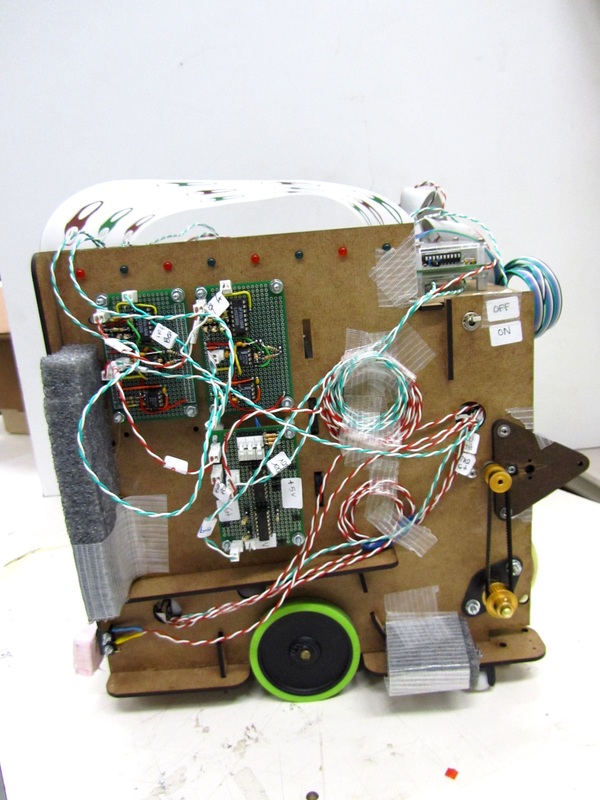
The electronics are pimarlily located on the external sides of the robot, so that they may be easily accessible. The E128, and a power distribution board are on the front suface. The sensing, LED driving, and ball gathering motor circuits are located on the sides of the robot. The motor driving boards are on the bottom plane, near the motors and batteries.
The wheels and hubs, supplied by Bane Bots, attach to our 1/4" axles with a set screw. The axle is supported at two points using 1/4" nylon spacers, which were we attained for free. The spacers were press fit into the masonite skeleton. The axle is coupled to the driving maxon motors using spider couplers.
The ball gathering roller is coupled to its motor by a 1/4" belt and pulley system. The 1/4" brass axle of the roller is supported at two ends with needle roller bearings. The foam was radially split using a hot wire cutter so that the the axle could be installed through its axis. Two masonite wheels cap either end of the foam, and attach the foam to the masonite with 4" long strips of bailing wire that extend into the foam. The masonite wheels are fitted to the metal ends of a spider couple, which is clamped to the axle. This assembly has proven to be very effective at pick up ping-pong balls, features a wide intake area, and requires minimal power to drive. A sheet of poster paper serves as the smooth ramp to guide the balls from the ground to their launch trajectory. A sheet of mylar guide the balls from the launch trajectory, into the hopper.
The ball hopper features a slight ramp so that balls may roll by gravity to the exit of the hopper. A servo swings a gate out of the way when desired so that the balls may roll into the bins.
The electronics are pimarlily located on the external sides of the robot, so that they may be easily accessible. The E128, and a power distribution board are on the front suface. The sensing, LED driving, and ball gathering motor circuits are located on the sides of the robot. The motor driving boards are on the bottom plane, near the motors and batteries.


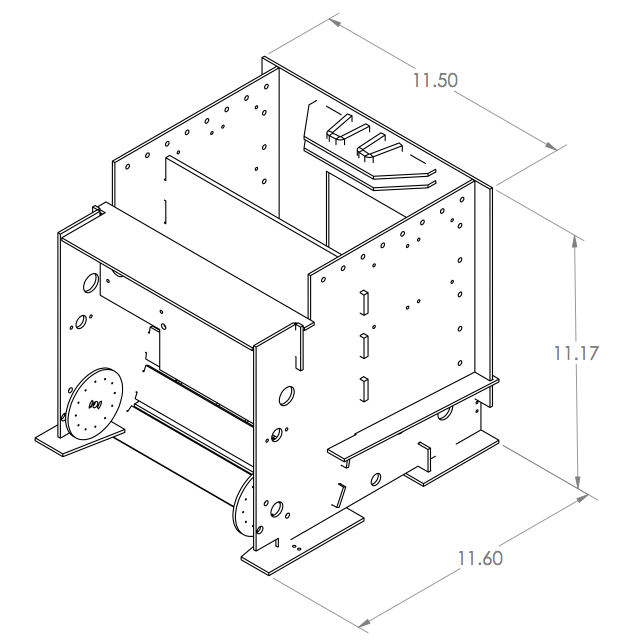
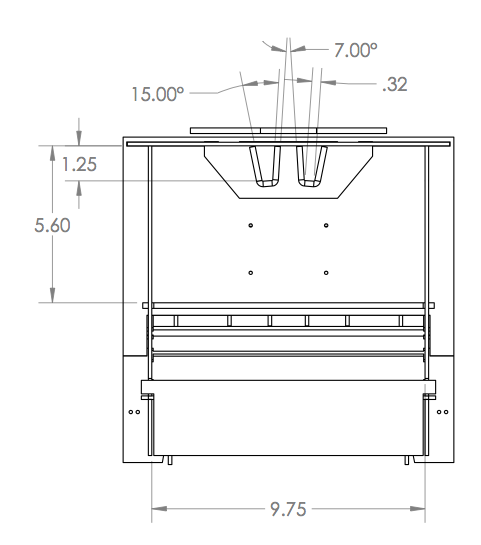
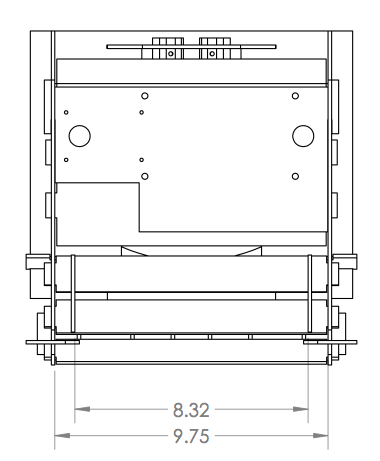
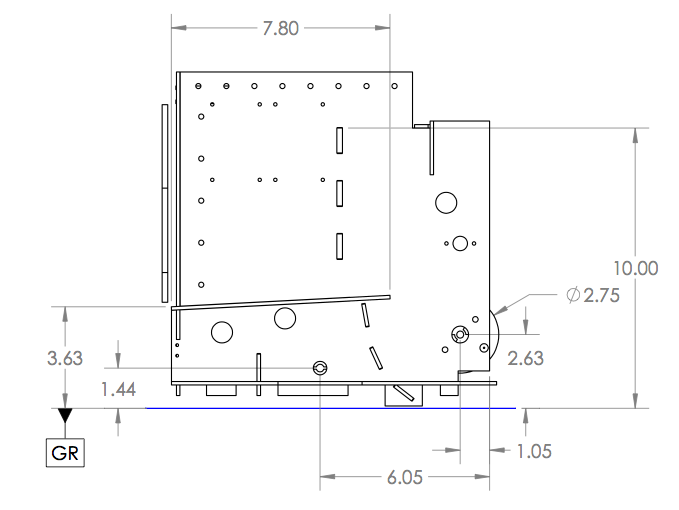
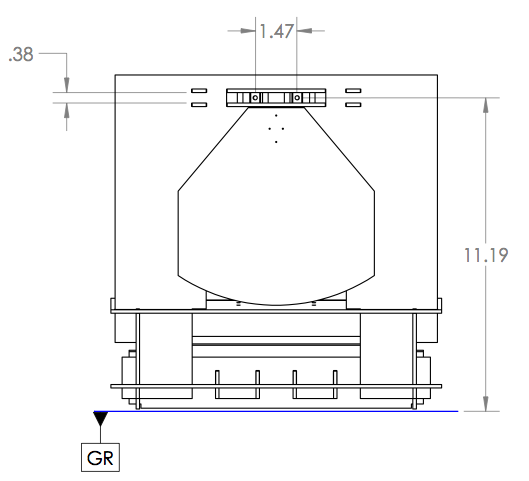
Design Drawings
Bill of Materials
| Item | QTY | Supplier | Comment | Total Cost |
|---|---|---|---|---|
| Blue LEDs | 8 | Jameco | $1.60 | |
| Red LEDs | 8 | Shop | $3.00 | |
| Variable voltage regulator | 1 | Shop | $1.00 | |
| 5V Voltage regulator | 1 | Shop | $1.00 | |
| Limit switches | 2 | Shop | $3.00 | |
| 2N7000 N-Ch MOSFET | 2 | Shop | $0.20 | |
| 7.2V NiCd Battery | 3 | Shop | $35.00 | |
| Foam roller | 1 | House of Foam | $9.00 | |
| 12V DC motor | 1 | Jameco | $7.00 | |
| HXT 500 Servo | 1 | Shop | $5.00 | |
| Hex hub wheels | 2 | Trossen Robotics | $10.00 | |
| Heat sink | 2 | Jameco | $3.00 | |
| SPDT Power Switch | Shop | $1.50 | ||
| Roller Bearings, 1/4" shaft | 2 | Mcmaster Carr | $10.23 | |
| Timing Belt Pully, 1/16" Shaft | 1 | Mcmaster Carr | $9.65 | |
| Timing Belt Pully, 1/8" Shaft | 1 | Mcmaster Carr | $9.95 | |
| Timing Belt | 1 | Mcmaster Carr | $2.25 | |
| Spider coupler | 2 | Shop | $3.00 | |
| Maxon Motors | 2 | Shop | Free | |
| Phototransistor | 2 | Shop | $1.00 | |
| LM339 Comparator | 2 | Shop | $0.40 | |
| LM6142 Op-amp | 4 | Shop | Free | |
| Misc. resistors | Shop | $0.50 | ||
| Ball caster | 2 | Trossen Robotics | $6.00 | |
| Misc. fasteners and mounting hardware | Ace Hardware | $5.00 | ||
| Masonite/Build Cost | Stanford Room 36 | $8.00 | ||
| Total | ||||
| $149.20 |
